
Zephyr RTOS is a highly versatile, open-source real-time operating system designed for embedded devices, supporting a wide range of hardware architectures, including Intel® x86. Its modular design allows developers to customize the RTOS to meet specific application needs, making it an excellent choice for RTOS in MCS workload consolidation on Intel® platforms. Zephyr’s support for preemptive multitasking and real-time scheduling to ensure critical tasks are prioritized and executed with minimal latency, which is crucial for time-sensitive applications.
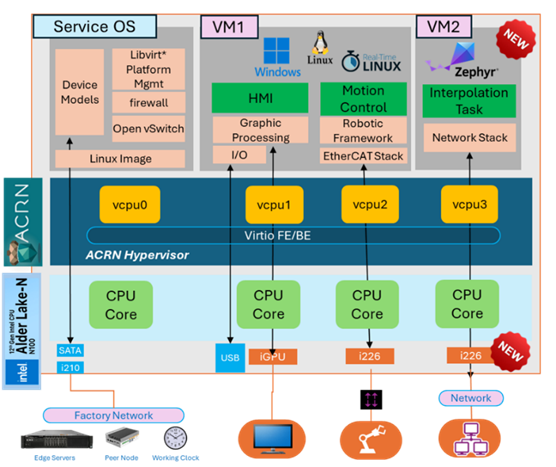
ACRN hypervisor is a type-1 bare metal open-source hypervisor, supports multi-VM configurations, and with Zephyr’s efficient memory management and small footprint, it is ideal as a single-core Real-Time Virtual Machine (RTVM) on multi-core CPUs. This setup allows ACRN to manage combination of both general purpose VMs and Zephyr RTVM, each running its own instances, leveraging multi-core architecture for better performance and isolation. This is especially beneficial for industrial mixed critical workloads consolidation requiring reliability, real-time performance, and resource isolation. Zephyr’s support for industrial automation includes precise timing, secure boot, and over-the-air updates, ensuring reliable operation in demanding environments. Its scalability and cross-architecture support make it suitable for various industrial IoT applications, from factory automation to smart grids.
Zephyr v3.7 as RTVM on ACRN forIntel® Processor N-series now includes a reference implementation Ethernet driver for Intel® i226 Ethernet controller, enabling low-latency jitter and cycle-time communication for time-sensitive applications. This is especially important for various motion control use cases such as stationary robotic interpolation tasks, enhancing smooth and accurate movements. The low-latency capabilities of the Intel® i226, combined with Zephyr’s real-time performance, make it ideal for consolidating workloads through type-1 hypervisor such as ACRN for use cases like industrial robotics control, HMI, and automation systems on a single multi-core CPU platform. This integration enhances the efficiency and reliability of industrial or robotic operations, allowing for more responsive and precise control in complex environments.

.png)
.png)