The 1st PRC IoT Open Source Projects Seminar will be held from June 11 to 12, 2019,We are very pleased to invite you to attend the Event in Shanghai.
Open source is now mainstream in all software stack, Intel is leading open source software development which covers a large span of technologies from virtualization, real-time, security and safety etc. Numerous IoT innovations can benefit from these open source projects, from device to edge to cloud with Intel platforms.
ACRN will be a key sponsor for this seminar. You will learn the ACRN v1.0 key features, the new architecture changes for industry real-time workload consolidation, future roadmap, and so on. You’ll also see a lot of demos from both ACRN and its partners. This will also be a good opportunity for the community to get to know each other and discuss technical opens, provide feedback and suggestions interactively.
HopeRun Software announced that it has become a strategic software partner of the open source technology Project ACRN, which will be a key component of its virtualization strategy. This is another major development for HopeRun Software’s IoT engagement. They have added support for 74 chip-level capabilities on the HiHope platform which will have a significant impact in the field of embedded virtualization such as in-vehicle, power management, and retail.
ACRN: Embedded Virtualization Open Source Platform for IoT
Embedded IoT virtualization is faced with three major challenges.
The first challenge is the need to support multiple operating systems. In the embedded ecosystem there are a variety of operating systems and software solutions when compared to the cloud environment.
The second challenge is the support for additional hardware resource sharing. Cloud virtualization sharing covers the traditional CPU, memory, storage, and network resources. Taking the in-car scenario as an example of the IoT field, it is necessary to concurrently support the sharing of camera image processing, peripheral sharing of audio resources, and security hardware. These are not typically relevant in the cloud.
The third challenge is the integration of simultaneous security and non-security domains. These are very important in smart driving and other IoT application scenarios. Integrating both scenarios in the same hardware environment is a significant technical challenge.
The ACRN hypervisor project was launched in March 2018 as part of the solution to these challenges. ACRN is lightweight, real-time, adaptable, open source, security, as well as others. It has become a leading open source hypervisor in the IoT field. It intentionally has a small footprint, under 25K lines of source code. It is the hypervisor designed specifically for embedded IoT.
ACRN has rich virtualization feature set as well as extensive IO sharing capabilities. It supports each operating system running as a virtual machine (VM) on the same platform for better security isolation. Hypervisor technology provides a significant advantage by enabling workloads of different types to be consolidated onto a single platform. This reduces development and deployment costs and allows for a leaner overall system architecture. This helps customers save on hardware costs while providing strong technical support for security and efficiency of the entire system.
Three advantages of HopeRun Software align with ACRN’s virtualization strategy
ACRN is an open source virtualization solution which provides the foundation for companies like HopeRun to create a productized solution. HopeRun Software has three key advantages in productizing ACRN.
First, ACRN focuses on four major embedded virtualization areas including retail, industrial, energy, and automotive. The IoT strategy announced by HopeRun Software is strategically aligned by focusing on smart retail, smart power, smart driving, etc. Through years of software engineering practice, HopeRun Software has established deep and long-term cooperative relationships with many leading customers such as Yum! China and State Grid Power in the fields of retail and power industry. HopeRun Software believes that many other major industry players will also be deploying ACRN-based complete virtualization solutions.
Second, HopeRun Software has established a technical team of nearly 100 people, with strong technology development and virtualization solutions capabilities. HopeRun Software has been following the development of ACRN technology closely since its inception.
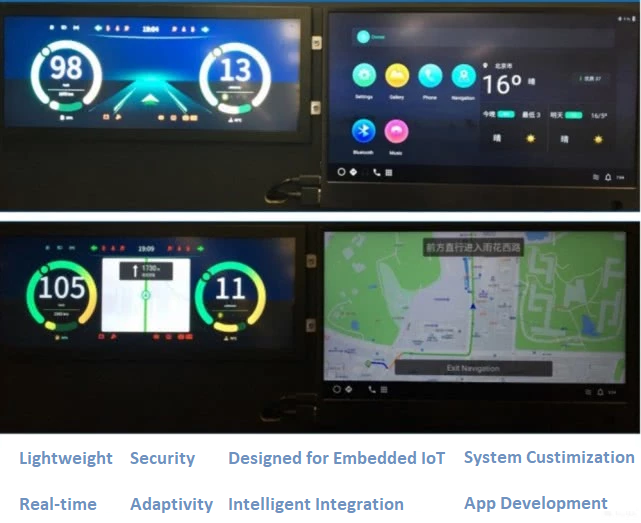
Third, HopeRun has rapidly developed its own unique integration solution capabilities such as car dashboard cluster, developing and testing and customization, development and testing for in-vehicle infotainment (IVI) system, as well as many others. At the beginning of 2019, HopeRun Software pioneered the prototype of the ACRN-based smart cockpit in China: the software-defined cockpit SDC.
ACRN and the HopeRun and HiHope Solution
ACRN is neutral governance, open source project supporting X86, ARM and a diverse set of other architectures. In the early 2018, HopeRun Software officially launched HiHope, a new generation of artificial intelligence computing open source platform. It fully supports the ARM architecture. In March of this year (2019), HopeRun Software published a list of 74 chip-level capabilities[based on ARM architecture, covering a comprehensive capability chain such as chip-level design, chip-level hardware, chip-level software, and chip-level solutions. HopeRun Software is actively planning to port the HiHope platform to the X86 architecture.
The HopeRun Software HiHope platform’s approach of “Chip + Algorithm + Application” provides an end-to-end solution. The technical and deployment system and one-stop professional delivery mode for complete pre-research, design, development and testing, provides an extensive environment for imagination in deepening strategic cooperation to rapidly expand customers and markets in the field of embedded virtualization such as retail, energy, and automotive.
Neusoft entered the field of automotive electronics through cooperation with Alpine in 1991. In the past 27 years, the company has solidified its technical strength, accumulated deep technical experience, and integrated the innovation capabilities of automotive electronics technology from three diverse geographic regions. Neusoft has established extensive cooperation with many of the world’s top automakers with rich experience in products and services and has signed framework contracts with a number of domestic and foreign automakers. A number of automotive electronic products have been planned, designed and developed under the cooperative development architecture.
Neusoft Automotive also relies on intelligent products and scenario-oriented functions to continuously and actively enhance the driving experience. The smart cockpit system connected to the cloud and deeply integrated with the Internet, an open intelligent connected ecosystem is built to provide a complete set of intelligent connected travel solutions.
Neusoft Automotive has made advanced planning in line with the trends in the context of the four transformations of automotive electronics (electric-driven, intelligent, connected and shared). Taking advantage of its years of experience with in-vehicle products and technological innovation, Neusoft has become the first Chinese company to develop a smart cockpit system and achieved mass production. Development of the smart cockpit system required overcoming significant challenges from the technology and from the industry.
First, comprehensive commercial solutions were costly and difficult to customize. This made it difficult to meet the project’s schedules. Second, virtualization technologies based on X86 platforms required both high performance and security of the GPU. Finally, the electronic cockpit system based on virtualization technology required integrating a great many technologies, and complex hardware and software architectures.
ACRN assists Neusoft Automotive in developing a smart cockpit system
In the early stage of the smart cockpit system R&D, Neusoft Automotive evaluated and selected the open source ACRN project from a number of virtualization solutions. Adopting ACRN meets the needs of Neusoft Automotive and automakers by:
First, ACRN meets the technical needs by adapting the virtualization technology to effectively isolate the dashboard and the central control operating system, by supporting rich IO sharing and the latest Android version;
Second, the use of ACRN makes it easy to expand the basic functionality of the electronic cockpit and to quickly respond to customer feedback.
In the course of this project Neusoft Automotive, with its years of experience in in-vehicle products and the technical knowhow, provided valuable expertise that resulted in significantly improved ACRN functionality. For instance:
The support for GPIO control has been extended on ACRN, which better meets the development needs of automakers in real-world circumstances;
Neusoft Automotive added support for DSI screens to the existing support for two HDMI screens, thus enabling ACRN to support three screens, as required to meet the needs of high-end smart cockpit systems;
The support for PWM has been extended. This enables ACRN support for screen brightness adjustment and other related functions;
The virtualization of support for sounds has been achieved on ACRN;
An overall upgrade plan for the electronic cockpit system based on ACRN has been achieved;
Project Instance
As shown above, the project is a smart cockpit system developed together by Neusoft Automotive and Intel for automotive electronics manufacturers, using the Intel Apollo Lake SOC hardware solution and the ACRN software solution. In addition to the support for common functions such as full-LCD instruments and entertainment information systems, the project also supports 360-degree panorama view, DVR, fatigue driving detection, alarm and other functions, as well as mainstream third-party Android APPs.
“The smart cockpit system based on ACRN and the Intel platform is a key platform for mass production of Neusoft Automotive,” said Meng Lingjun, Vice President of Neusoft Corporation and GM of Neusoft Automotive, “Neusoft and Intel have jointly initiated the mass production project of ACRN-based smart cockpit system, under which the first product of mass production is believed to be successfully developed with the joint efforts of the two parties. Combining the strong technical strengths and innovative abilities of the two companies, they will gain greater market share in China.”
About ACRN
Released by the Linux Foundation in March 2018, ACRN is a flexible, lightweight reference hypervisor. It is built with real time and safety-criticality in mind, optimized to streamline embedded development through an open source platform. The project provides a reference design framework for industry leaders to build an open-source embedded hypervisor, which is especially suitable for the IoT field.
About Neusoft
Neusoft provides innovative information technology – enabled solutions and services to meet the demands arising from social transformation, to shape new life styles for individuals and to create values for the society. Through 27 years of practice and accumulation in the field of automotive electronics, Neusoft has become the world’s leading provider of in-vehicle infotainment systems. Neusoft is the first listed software company in China, and the first software company in China which pass the CMM5 Level 5 and CMMI (V1.2) Level 5 certifications. For more information, please visit: http://www.neusoft.com
We are pleased to announce the release of ACRN™ Hypervisor version 1.0, a key Project ACRN milestone focused on automotive Software-Defined Cockpit (SDC) use cases and introducing additional architecture enhancements for more IoT usages, such as Industrial workload consolidation.
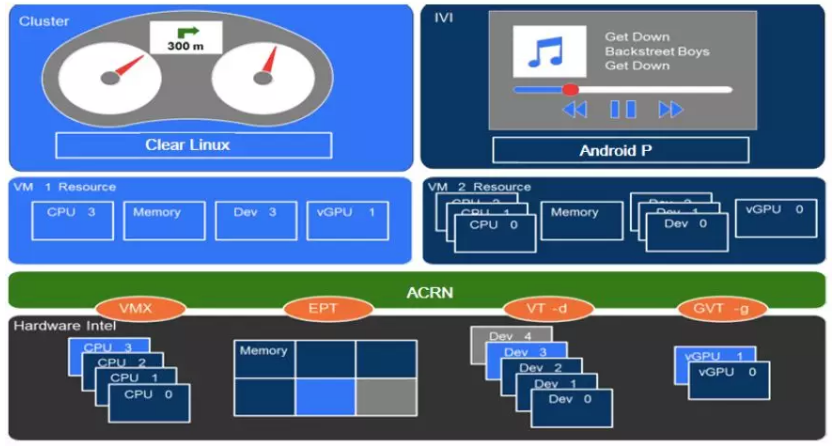
This v1.0 release is a production-ready reference solution for SDC usages that typically require multiple VMs, GPU sharing, and rich I/O mediation for sharing storage, network, USB devices, and more. This release also includes architectural enhancements for supporting diverse IoT workload consolidation usages, for example, Logical Partition mode and initial Real-Time VM support.
In this reference release, we use Clear Linux* as the Service OS (SOS) and User OS (UOS). Android* and other Linux* based OSes can also be used as a UOS.
ACRN supports multiple x86 platforms and has been tested with Apollo Lake and Kaby Lake NUCs, and the Apollo Lake UP Squared (UP2) board.
Supported Firmware
UEFI BIOS and Slim Bootloader (SBL) have been tested on NUC and UP2 boards. Slim Bootloader is a modern, flexible, light-weight, open source reference bootloader that is also fast, small, customizable, and secure.
Supported OSes
Clear Linux is supported and used as the release reference for the Service and User OS.
CPU Virtualization
Based on Intel VT-x virtualization technology, ACRN emulates a virtual CPU with core partitioning. The ACRN hypervisor supports virtualized APIC-V, EPT, IOAPIC, and LAPIC functionality.
GVT-g Virtual Graphics (a.k.a. AcrnGT)
GVT-g virtual graphics support lets the Service OS and User OS applications run GPU workloads simultaneously with minimal overhead. This helps ensure that both the SOS and the UOS instances can benefit from the full physical GPU capabilities.
AcrnGT supports Direct display, where the Service OS and User OS are each assigned to a different display. The display ports support eDP and HDMI.
AcrnGT supports GPU Preemption, where the system will preempt GPU resources occupied by lower priority workloads when needed. GPU preemption ensures the graphics performance needs of critical workloads can be met, such as the display frame rate per second of an SDC Instrument Cluster.
AcrnGT supports Surface Sharing, which allows the SOS to access an individual surface (or a set of surfaces) from the UOS without accessing the entire frame buffer of the UOS.
Devices Features
Device pass-through: VT-d provides hardware support for isolating and restricting device access to only the owner of the partition managing the device. It allows assigning I/O devices to a VM and extending the protection and isolation properties of VMs for I/O operations.
Virtio virtualization: The Service OS and User OS applications can share physical devices using industry-standard I/O virtualization virtio APIs, where performance-critical device sharing is enabled. By adopting the virtio specification, we can reuse many frontend virtio drivers already available in a Linux-based User OS, dramatically reducing the development effort for the frontend drivers.
Ethernet: ACRN hypervisor supports virtualized Ethernet functionality. The Ethernet Mediator is executed in the Service OS and provides packet forwarding between the physical networking devices (Ethernet, Wi-Fi, etc.) and virtual devices in User OS VMs. The HW platform physical connection can be shared, for regular (i.e. non-AVB) traffic, with Linux or Android applications by the SOS.
Wi-Fi: ACRN hypervisor supports pass-through of the Wi-Fi controller to a UOS, enables control of Wi-Fi as an in-vehicle hotspot for third-party devices, provides third-party device applications access to the vehicle, and provides third-party devices access to the TCU (if applicable) used to interpret and disperse data between electronic systems in an automobile.
Bluetooth: ACRN hypervisor supports Bluetooth controller pass-through to a single UOS, for example, for In-Vehicle Infotainment (IVI) use cases.
Mass Storage: ACRN hypervisor supports virtualized non-volatile R/W storage for Service OS and User OS instances, supporting VM private storage and storage shared between User OS instances.
USB Virtualization: ACRN hypervisor supports pass-through of USB xDCI controllers to a User OS from the platform. ACRN hypervisor supports an emulated USB xHCI controller for a User OS.
Image Processing Unit (IPU): ACRN hypervisor provides an IPU mediator to share with a User OS. Alternatively, the IPU can also be configured as pass-through to a User OS without sharing.
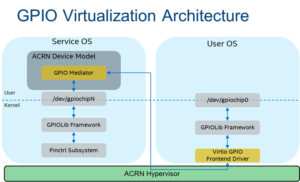
GPIO virtualization: ACRN supports GPIO para-virtualization based on the Virtual I/O Device (Virtio) specification. The GPIO consumers of the front-end are able to set or get GPIO values, directions, and configuration data via one virtual GPIO controller. In the back-end, the GPIO command line in the launch script can be modified to map native GPIO to a UOS.
Logical partition mode
In addition to “shared partition mode” support common in SDC use cases, ACRN supports a new “logical partition mode” for supporting industrial uses. With logical partitioning, all UOS VMs are launched directly by the hypervisor and not through the SOS VM, allowing the UOS VMs to run with minimal hypervisor intervention.
Preliminary support for Industrial workload consolidation
While this release focuses on SDC use-cases, this release includes preliminary support for Industrial use-cases.
ACRN supports starting a UOS VM as a “Pre-launched VM”, (launched before the Service OS is started), and a “Post-launched VM”, (launched by the Service OS).
Cache Allocation Technology (CAT) is available on Apollo Lake (APL) platforms, providing cache isolation between VMs. CAT is used mainly for real-time performance quality of service (QoS).
ACRN supports Device-Model QoS based on a runC container to control the SOS resources (CPU, Storage, MEM, NET) by modifying the runC configuration file.
Refer to the ACRN version 1.0 release notes for more details. To learn more about the ACRN project community and products using ACRN, visit the projectacrn.org website.
About the ACRN™ Project
ACRN is a flexible, lightweight reference hypervisor, built with real-time and safety-criticality in mind, optimized to streamline embedded development through an open source platform. To learn more, please visit https://projectacrn.org/.
About the Linux Foundation
Founded in 2000, the Linux Foundation is supported by more than 1,000 members and is the world’s leading home for collaboration on open source software, open standards, open data, and open hardware. Linux Foundation’s projects are critical to the world’s infrastructure including Linux, Kubernetes, Node.js, and more. The Linux Foundation’s methodology focuses on leveraging best practices and addressing the needs of contributors, users and solution providers to create sustainable models for open collaboration. For more information, please visit us at linuxfoundation.org.
We are pleased to announce the release of Project ACRN version 0.8 (see the release notes and documentation). ACRN is a flexible, lightweight reference hypervisor, built with real-time and safety-criticality in mind, optimized to streamline embedded development through an open source platform. Check out the Introduction to Project ACRN for more information. The project team encourages you totry it out, and also to join the weekly technical call.
All project ACRN source code is maintained in the https://github.com/projectacrn/acrn-hypervisor repository and includes folders for the ACRN hypervisor, the ACRN device model, and documentation. You can either download this source code as a zip or tar.gz file (see the ACRN v0.8 GitHub release page or use git clone and checkout commands:
git clone https://github.com/projectacrn/acrn-hypervisor
cd acrn-hypervisor
git checkout v0.8
GPIO virtualization is supported as para-virtualization based on the Virtual I/O Device (VIRTIO) specification. The GPIO consumers of the Front-end are able to set or get GPIO values, directions, and configuration via one virtual GPIO controller. In the Back-end, the GPIO command line in the launch script can be modified to map native GPIO to UOS.
Enable QoS based on runC container
ACRN supports Device-Model QoS based on runC container to control the SOS resources (CPU, Storage, MEM, NET) by modifying the runC configuration file.
S5 support for RTVM
ACRN supports a Real-time VM (RTVM) shutting itself down. A RTVM is a kind of VM that the SOS can’t interfere at runtime, and as such, can only power itself off internally. All poweroff requests external to the RTVM will be rejected to avoid any interference.
Document updates
Several new documents have been added in this release, including:
We are pleased to announce the release of Project ACRN version 0.7 (see the release notes and documentation). ACRN is a flexible, lightweight reference hypervisor, built with real-time and safety-criticality in mind, optimized to streamline embedded development through an open source platform. Check out the Introduction to Project ACRN for more information. The project team encourages you totry it out, and also to join the weekly technical call.
All project ACRN source code is maintained in the https://github.com/projectacrn/acrn-hypervisor repository and includes folders for the ACRN hypervisor, the ACRN device model, and documentation. You can either download this source code as a zip or tar.gz file (see the ACRN v0.7 GitHub release page or use git clone and checkout commands:
git clone https://github.com/projectacrn/acrn-hypervisor
cd acrn-hypervisor
git checkout v0.7
Cache Allocation Technology (CAT) is enabled on Apollo Lake (APL) platforms, providing cache isolation between VMs mainly for real-time performance quality of service (QoS). The CAT for a specific VM is normally set up at boot time per the VM configuration determined at build time. For debugging and performance tuning, the CAT can also be enabled and configured at runtime by writing proper values to certain MSRs using the wrmsr command using the ACRN shell.
Support ACPI power key mediator
ACRN supports ACPI power/sleep key on the APL and KBL NUC platforms, triggering S3/S5 flow, following the ACPI spec.
Document updates
Several new documents have been added in this release, including:
See the full release notes for details about new features, issues addressed, known issues remaining, and the change log since the previous 0.6 release.
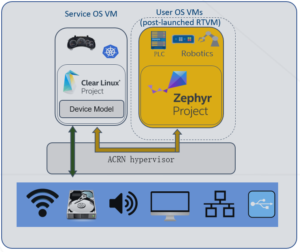
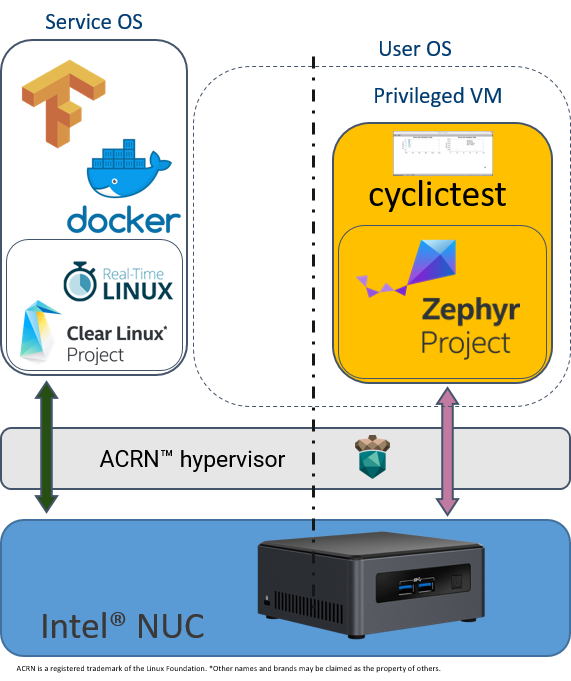
Embedded World 2019, held in Nuremberg, Germany, showcased the best of the embedded and IoT industry’s latest innovations and trends to over 30,000 visitors. Project ACRN™ was present at the Linux Foundation’s Zephyr™ Project booth. The Zephyr Project is a small, scalable open-source Real-Time Operating System (RTOS) for IoT embedded devices. ACRN is a flexible, lightweight reference hypervisor, built with real-time and safety-criticality in mind.
Project ACRN and Zephyr Project engineering teams are collaborating to make one of the hottest trends a reality: workload consolidation, the ability to run multiple, heterogeneous functions on a single embedded system. While there are many techniques to do this, few offer a path that supports deterministic, real-time workloads or sub-systems that are Functional Safety (FuSa) certifiable. Zephyr combined with ACRN, now offers such a path forward.
At Embedded World 2019, we demonstrated the Zephyr RTOS running in an ACRN Virtual Machine (VM) in a real-time configuration, while concurrently showing a Clear Linux VM running an Artificial Intelligence (AI) object detection algorithm.
These are exciting times to live in with such transformations and innovation happening in the industry. ACRN and Zephyr are at the forefront of the innovation bringing new, open-source solutions that will help the embedded and IoT industry segments transform for the future.
2019 will be an exciting year for project ACRN. Several big things are planned:
By early Q2, we’ll welcome ACRN v1.0 and provide a stable software reference for Software-Defined-Cockpit (SDC) usage on Intel Apollo Lake platforms.
Real-Time OS will be supported, opening use of ACRN in industrial scenarios needing low latency, and fast, predictable responsiveness. Initial support is for VxWorks and Zephyr OS as Real-Time guest OSes in Q2, and PREEMPT-RT Linux in Q3.
A new ACRN Hybrid Mode will be completed in Q2, giving ACRN the ability to run mixed-criticality workloads. For example, running a Real-Time Guest OS with a time sensitive application and dedicated hardware resources assigned, together with a normal priority Guest OSes (UOS) running with Service OS (SOS) and sharing the remaining hardware devices.
Windows as Guest (WaaG) will be officially supported in Q4, but you will see incremental features merged before that. For example, we’ll soon introduce a virtual boot loader, OVMF, that enables UEFI support for Virtual Machines required for supporting WaaG.
Kata Containers will be supported in Q3. Kata Containers is an open source project and community working to build a standard implementation of lightweight Virtual Machines (VMs) that feel and perform like containers, but provide the workload isolation and security advantages of VMs.
More I/O device virtualization will be implemented to enrich ACRN’s IoT device hypervisor capability, including GPIO virtualization in Q1, I2C virtualization in Q2 and Intel GPU Gen11 support in Q4.
CPU sharing will be a big thing for ACRN. Typically used for embedded systems, a partitioned CPU will be assigned to a Guest VM to benefit the isolation and fast response from hardware. There’s also a requirement for non-critical usage for sharing CPU cores among multiple VMs to better support Kata container.
Functional Safety (FuSa) certification process will be applied to ACRN core feature development, and ultimately help ACRN be deployed in industrial or automotive (SDC) uses.
The major new and updated features are summarized in the release notes, along with bugs fixed and known issues. These are the new features in 0.6:
New Features:
Enable Privileged VM support for real-time UOS in ACRN: Initial patches to enable a User OS (UOS) running as a virtual machine (VM) with real-time characteristics, also called a “Privileged VM”. We’ve published a tutorial Using PREEMPT_RT-Linux for real-time UOS. More patches for ACRN real time support will continue.
The major new and updated features are summarized in the release notes, along with bugs fixed and known issues. These are the new features in 0.5:
New Features:
OVMF support initial patches merged in ACRN: To support booting Windows as a Guest OS, we are using Opensource Virtual Machine Firmware (OVMF). The initial patches to support OVMF have been merged into the ACRN hypervisor. Note: There will be additional patches for ACRN and patches upstreaming to OVMF.
UP2 board serial port support: This release enables serial port debugging on UP2 boards during SOS and UOS boot.
One E2E binary to support all UEFI platform: ACRN can support both ApolloLake (APL) and KabbyLake (KBL) NUCs. Instead of having separate builds, this release offers community developers a single end-to-end reference build that supports both UEFI hardware platforms, configured with a new boot parameter. See: Getting Started for more information.
APL UP2 board with SBL firmware: With this 0.5 release, ACRN now supports APL UP2 board with slim Bootloader (SBL) firmware. Slim Bootloader is a modern, flexible, light-weight, open source reference boot loader with key benefits such as speed, small footprint, customizable, and security. An end-to-end reference build with ACRN hypervisor, Clear Linux as SOS, and Clear Linux as UOS has been verified on UP2/SBL board. See the Using SBL on UP2 Board documentation for step-by-step instructions.