

Big changes are coming to the world of hypervisors. The open source Project ACRN is a device hypervisor targeting Edge and IoT devices. ACRN supports multiple Operating Systems (OSes) with diverse software stacks and a variety of workloads to run on the same platform enabling significant workload consolidation. Its small footprint means that it can be used in resource constrained environments. As Functional Safety (FuSa) hypervisors are being increasingly relied on to handle multiple workloads with speed and security, we are excited that ACRN is leading the way in becoming FuSA certified.
Because it is truly open source, optimized for real-time and built with safety criticality for IoT, ACRN is perfect for a variety of automotive, industrial and other safety critical projects. For instance, it is being used with Android to power cars of the future using open source technology to develop new automotive In-Vehicle-Infotainment (IVI) experiences as detailed in this case study: ACRN Helps Neusoft Automotive Develop Smart Cockpit Systems by Leveraging the Advantages of Open Source Technology. This is great news for Open Source developers, according to James Wu, director of Intel open source IOT hypervisors.
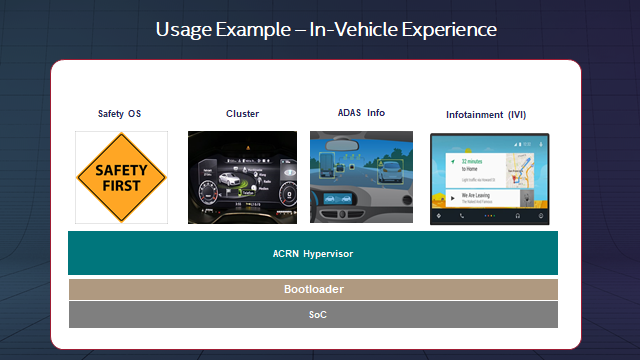
Workload consolidation has become a significant tool in deploying efficient, safety-oriented applications in various industries, especially automotive. That means instead of running on multiple processors, now you can use a single System on Chip (SoC) for IVI, Cluster and Advanced Driver Assistance Systems (ADAS) information.
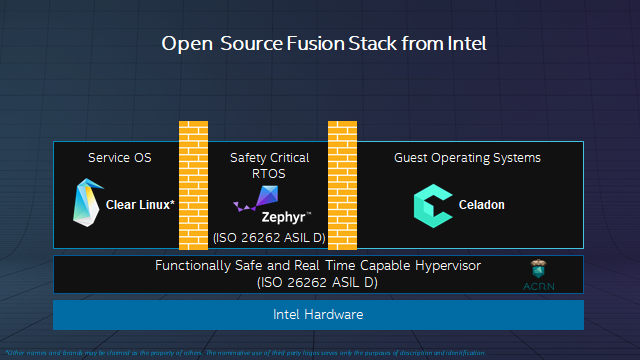
Based on ACRN, Intel is offering a path to a FuSA-capable open source fusion stack with Clear Linux, Zephyr and Celadon. Celadon is open source Android software stack on Intel architecture. It provides a turnkey solution that is flexible, verified compatible and it’s updated regularly. Celadon can stimulate compelling Android solutions for use in automotive and IOT projects.
ACRN was recently featured at the 2019 Open Source Summit held at Toranomon Hills Forum in Tokyo, Japan on July 17-19, 2019. Open Source Summit, Japan, is the leading conference in which technologists and open source industry leaders can collaborate, share information, learn about the latest in open source technologies and find out how to gain a competitive advantage by using innovative open solutions. Approximately 1,000 developers, operators and open source industry leaders attended the event to share, connect and learn about topics in the field. The event also featured the Automotive Linux Summit. This summit gathered many of the most innovative minds in automotive excellence and open-source expertise. This included automotive system engineers, Linux experts, R&D managers, business executives, open-source licensing and compliance specialists and community developers. The event also connected the developer community along with vendors and users providing and using the code in order to drive the future of embedded devices in the automotive arena.
Project ACRN was featured at this conference as an important open source project for automotive consolidation solution, including 2 demos and 4 technical sessions. The ACRN demo station also featured a demonstration of Celadon for automotive working with ACRN.
Demo 1 – Workload Consolidation using Celadon and ACRN
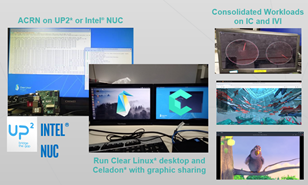
This demo showcased Project ACRN as a device hypervisor that enabling multiple simultaneous OSes, the essential capability required for workload consolidation. ACRN just released an automotive case study showing a device hypervisor for workload consolidation. For example, instead of running multiple processors, each with a different application environment, ACRN allows IVI, Cluster and ADAS information applications to be run on a single platform. The automotive IVI Celadon demo showed Controller Area Network (CAN) emulators with interactive controls and a dashboard, and Celadon running as the Guest OS on top of Project ACRN. This conference was the first to showcase the integration of Celadon as the Guest OS running on top of Project ACRN. Please see the photos of the demo below.
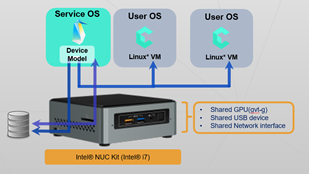
Figure 1 ACRN supports 2 or more Celadon as Guest OSes including networking and other I/O sharing capabilities
ACRN supported hardware can be found on the ACRN github.
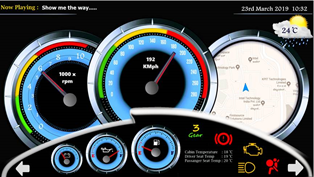
Figure 3 CELADON for traditional IVI – Native Android
To rerun this demo showing Celadon running on the ACRN hypervisor, please see the ACRN github tutorial Using Celadon as UOS. Also see the Celadon website for more information.
In this demo, attendees saw the rich I/O virtualization and Graphic sharing capability available with the ACRN hypervisor without degrading the 60 fps rendering regardless of what type of workload applications were running on the Guest OS.
Demo 2 – Consolidating Real-Time Workloads in Open-Source
In this demo, the ACRN hypervisor runs 2 virtual machines: a real-time VM (Zephyr RTOS) and a standard VM (Clear Linux). Artificial Intelligence (Tensor Flow) is used to provide object detection on a video stream. Zephyr runs on the same HW platform but in a privileged mode to ensure its real-time characteristics are preserved. A real-time benchmark is running inside Zephyr to demonstrate the real-time behavior of the system. A cloud device offers a user-friendly dashboard to see what is happening on the edge device, including visualizing the real-time benchmark (cyclic test) data.

Figure 4 Demo high level design
This demo is especially interesting because it shows a real-time VM running on the alongside a resource intensive Artificial Intelligence application using a standard VM.
For more information about real-time design with ACRN, please see the ACRN github workload design guidelines.
There were also 4 ACRN technical sessions:
Session 1 – Workload consolidation with ACRN hypervisor
This technical session was presented by James Wu, engineering director for the Intel IOT open source hypervisor from Intel, Shanghai.

Figure 5 James Wu highlights ACRN
In this session, James talked about a Based Reference Stack for Workload Consolidation, updated information about the version 1.0 release, the roadmap for the version 2.0 release, Open Source Android Stack running as the Guest OS on top of ACRN hypervisor to familiarize automotive OEMs with the ACRN features, roadmaps and approaches to the automotive segment.
Featured:
To obtain the presentation slides, please monitor Linux Foundation which will post all technical sessions as they become available.
Session 2 – Secure container in IoT segment, Extend KATA to ACRN IoT hypervisor
This session was presented by Yu Wang, ACRN engineering manager, from Intel Beijing.

This presentation was motivated by the fact that connected devices are increasingly expected to support a wide range of hardware resources, operating systems, and software tools/applications, making workload consolidation, resource isolation and safety the current hot topic. Container technology can be part of the solution. Kata Containers is a security enhanced container by leveraging Virtual Machine (VM) technology. Kata feels and performs like other containers, but provides the additional workload isolation and security advantages of VMs. Originally, Kata was designed for data center usage so it is still closing gaps for specific IoT segment requirements, For example: real-time, functional safety and embedded I/O mediator requirements. But it promises to be a valuable addition to the workload consolidation tool set.
Session 3 – ACRN/KATA: Secure Container Solution for Software-defined Cockpit
This presentation was by Jason Chen, Senior architect for ACRN hypervisor, from Intel Shanghai

Figure 9 Jason Chen addresses challenges for Vehicle Development and integration between ACRN and Kata
In this session, Jason Chen talked about how the widespread use of intelligence and networking in automobiles means that vehicles are no longer the traditional “sofa on wheels”. Automobiles have evolved into a significant IoT platform resulting in more and more Internet applications. At the same time, as the internet has been integrated into automobiles, addition functional safety requirements have become necessary for the safety of drivers and passengers. Information security has become increasingly serious in the automotive field, necessitating additional safety certifications and standards. To satisfy the need for additional internal requirements for safety and security, it has been necessary to accelerate the iteration rate for hardware/software system upgrades. The new challenge for automobile manufacturers is how to achieve this update rate. Container technology should be a significant part of the answer. Kata containers contributes to this by addressing enhanced security by combining container and Virtual Machines (VMs) technology in a way that still feels and performs like traditional containers.
Session 4 – Consolidation of Real-time and HMI with ACRN hypervisor
This session was presented by Jason, Senior architect of ACRN hypervisor.
He talked about the Value Proposition of ACRN hypervisor for Industrial workloads consolidation and usage of industry.
Featured:
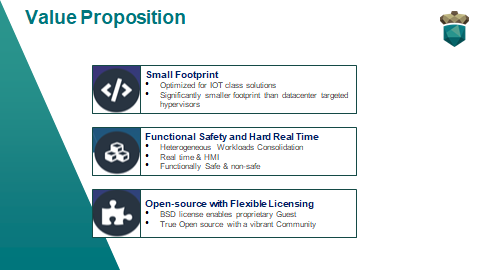
Figure 10 Value proposition of virtualization for industrial workloads consolidation
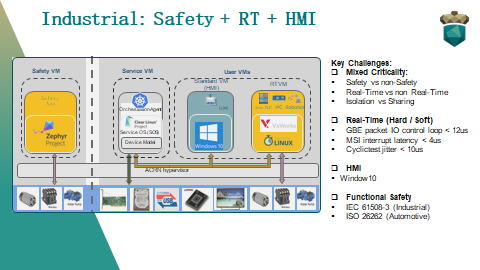
Figure 11 Usage and architecture design for controller, real-time function and HMI consolidation with ACRN hypervisor
Again, to obtain the presentation slides, please monitor Linux Foundation which will post all technical sessions as they become available.
This is second time that the ACRN hypervisor solution has been showcased at a conference in Japan. The first time was at ALS Japan 2018 which showed AGL running as guest the OS on top of ACRN hypervisor with GPU sharing. This presentation generated significant interest with companies looking for collaboration opportunities. Some of them have started demonstrating their solution based on ACRN hypervisor, Toyota is an example.