
We are pleased to announce the release of Project ACRN version 0.8 (see the release notes and documentation). ACRN is a flexible, lightweight reference hypervisor, built with real-time and safety-criticality in mind, optimized to streamline embedded development through an open source platform. Check out the Introduction to Project ACRN for more information. The project team encourages you totry it out, and also to join the weekly technical call.
All project ACRN source code is maintained in the https://github.com/projectacrn/acrn-hypervisor repository and includes folders for the ACRN hypervisor, the ACRN device model, and documentation. You can either download this source code as a zip or tar.gz file (see the ACRN v0.8 GitHub release page or use git clone and checkout commands:
git clone https://github.com/projectacrn/acrn-hypervisor
cd acrn-hypervisor
git checkout v0.8The project’s online technical documentation is also tagged to correspond with a specific release: generated v0.8 documents can be found at https://projectacrn.github.io/0.8/. Documentation for the latest (master) branch is available at https://projectacrn.github.io/latest/.
ACRN v0.8 requires Clear Linux OS version 28260 or newer. Please follow the instructions in the Getting started guide for Intel NUC.
Version 0.8 new features
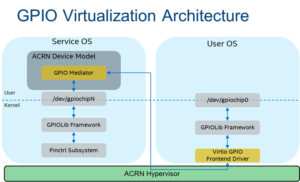
GPIO virtualization
GPIO virtualization is supported as para-virtualization based on the Virtual I/O Device (VIRTIO) specification. The GPIO consumers of the Front-end are able to set or get GPIO values, directions, and configuration via one virtual GPIO controller. In the Back-end, the GPIO command line in the launch script can be modified to map native GPIO to UOS.
Enable QoS based on runC container
ACRN supports Device-Model QoS based on runC container to control the SOS resources (CPU, Storage, MEM, NET) by modifying the runC configuration file.
S5 support for RTVM
ACRN supports a Real-time VM (RTVM) shutting itself down. A RTVM is a kind of VM that the SOS can’t interfere at runtime, and as such, can only power itself off internally. All poweroff requests external to the RTVM will be rejected to avoid any interference.
Document updates
Several new documents have been added in this release, including:
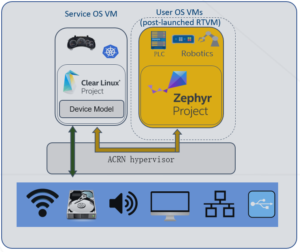
- Zephyr RTOS as Guest OS
- Enable cache QoS with CAT
- ACRN kernel parameter introduction
- FAQ update for two issues
- ACRN Debug introduction
Fixed Issues:
See the release notes.
Known Issues:
See the release notes.